人間への理解を深める
ロボットを格好良く賢くする
人・ロボットを仲よく助け合う
医工学の発展により様々な高機能義手が開発されたが、日常生活で使用されているのは極めて少なく、 希望と現状のギャップは開いたままである。切断者の残存筋肉の状況により、ロボットハンドの機能を発揮するためのsEMG信号が取得できないことは主な要因である。 本研究は、筋活動をマルチモーダルで確実に計測するセンサ、利用者の意図と義手の自動制御を統合した半自律制御、および義手動作の自動生成、 との三つのアプローチを組み合わせることで、義手を知能化する要素技術を開発する。


参考論文: Chen, et al., Dynamic Label Smoothing Strategy for Biosignal Classification, IEEE ICASSP, 2024
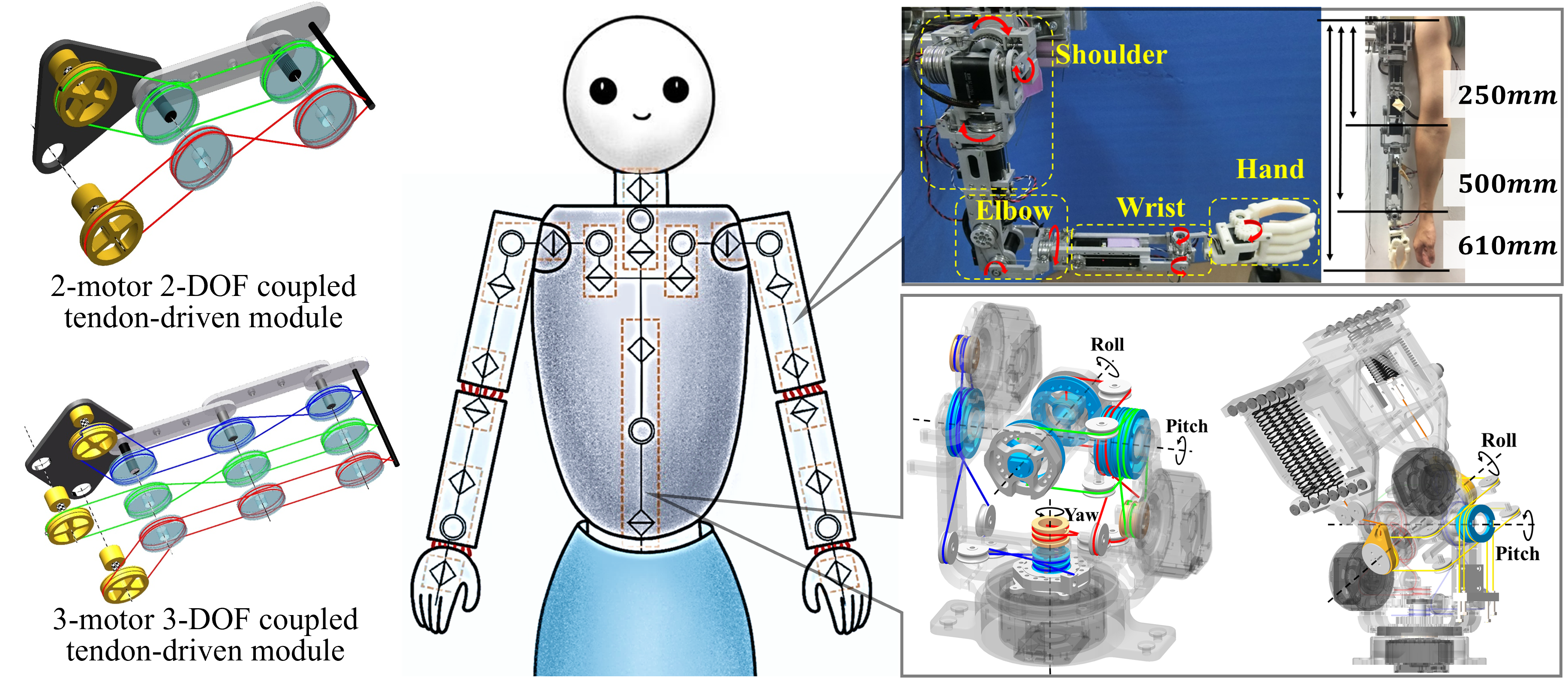
ヒト型ロボット研究開発の目標は人のように知的に振る舞う機械を実現することにあり、 中でも私たちの研究グループではヒトの運動学を再現しつつ既存の福祉機器や人体へ取り付けることが可能なロボットの開発を目指しています。 そのための手段として、ワイヤ干渉駆動機構と呼ばれる軽量かつ高出力、安全性を兼ね備える駆動方式の新しい設計法や、 汎用性の高いワイヤ・ばね系の重力補償機構を提案しています。これまでの研究により、 私たちはヒトの運動学に基づく7自由度ワイヤ干渉駆動ロボットアーム、 ワイヤ干渉駆動機構による腰関節ロボットを実現しました。特に前者は自重2.6kgでありながらペイロード2.5kgを実現しており、 これは過去に多く発表された同種のロボットアームの性能を上回るものとなっています。
Wang, et al., A 3-DOF Coupled Tendon-Driven Humanoid Waist, Advanced Robotics, 2024.
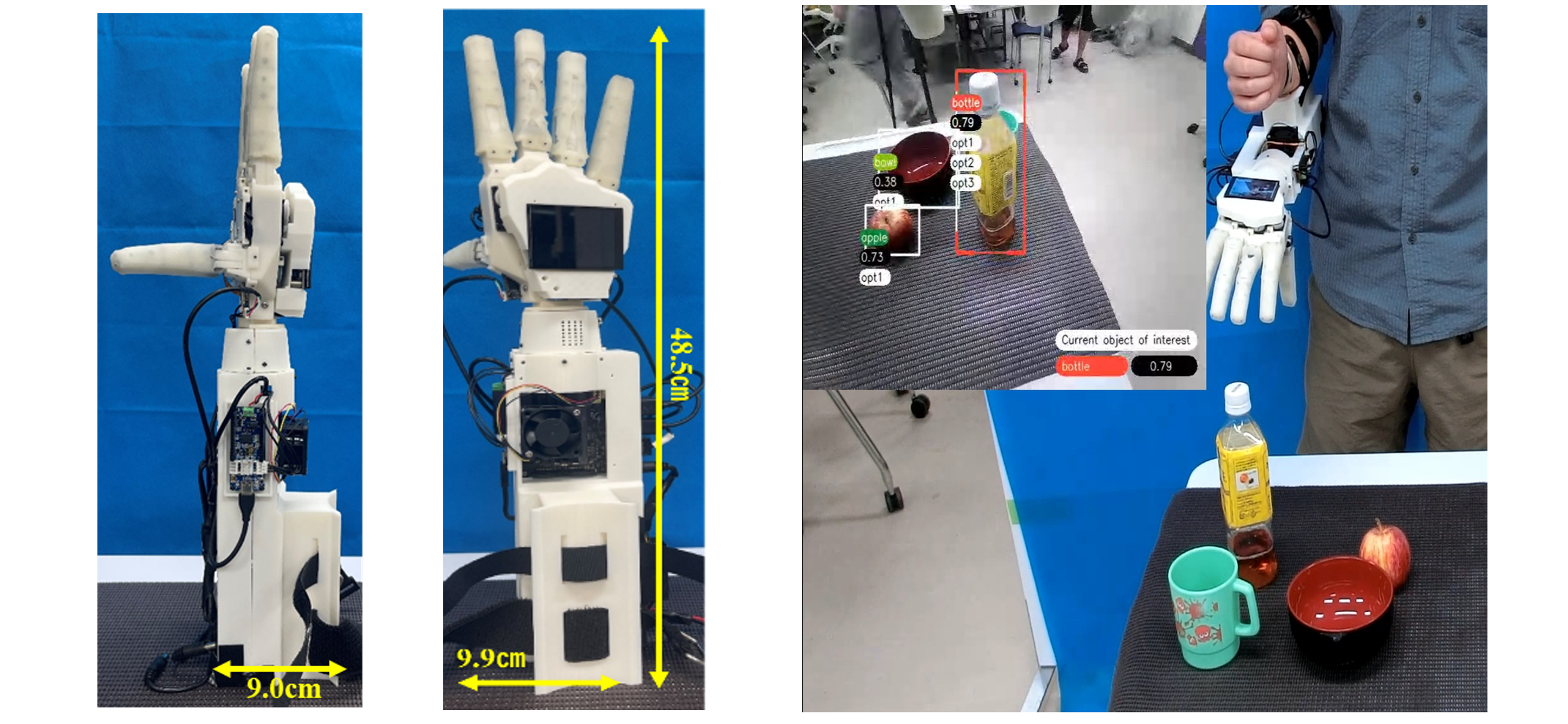
ロボットハンドには、人間の手と同じような繊細さと多機能性を持ち、
物体の操作や人間とのコミュニケーションを効果的に行えることが期待されている。また、安全性を確保し、
消費電力を最小限に抑えるため、ロボットハンドは軽量であることが望ましい。
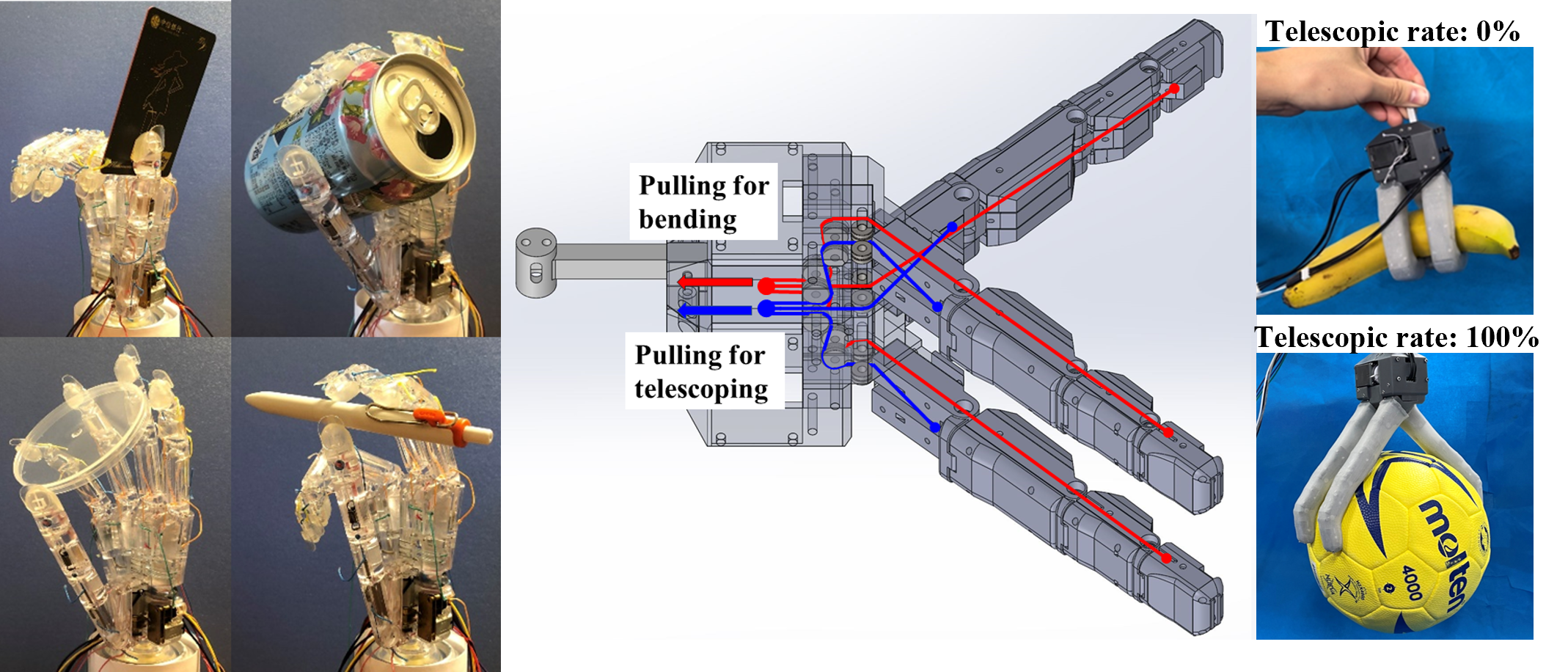
本研究室では、ロボットハンドの軽量化を実現するために、ワイヤ駆動と劣駆動を採用している。
ワイヤ駆動は他の駆動方式に比べてシンプルで軽量な方式であり、劣駆動はアクチュエータの数を減らすことで、
全体の軽量化に貢献する。これまでに、我々はモータ3個で駆動するワイヤ劣駆動型擬人化義手を開発し、
132.5gの重さでありながら、16種類の日常把持動作のうち13種類を実現した。
さらに、モータ2個で指の伸長率73.6%を実現した軽量(230g)3指ハンドも開発した。
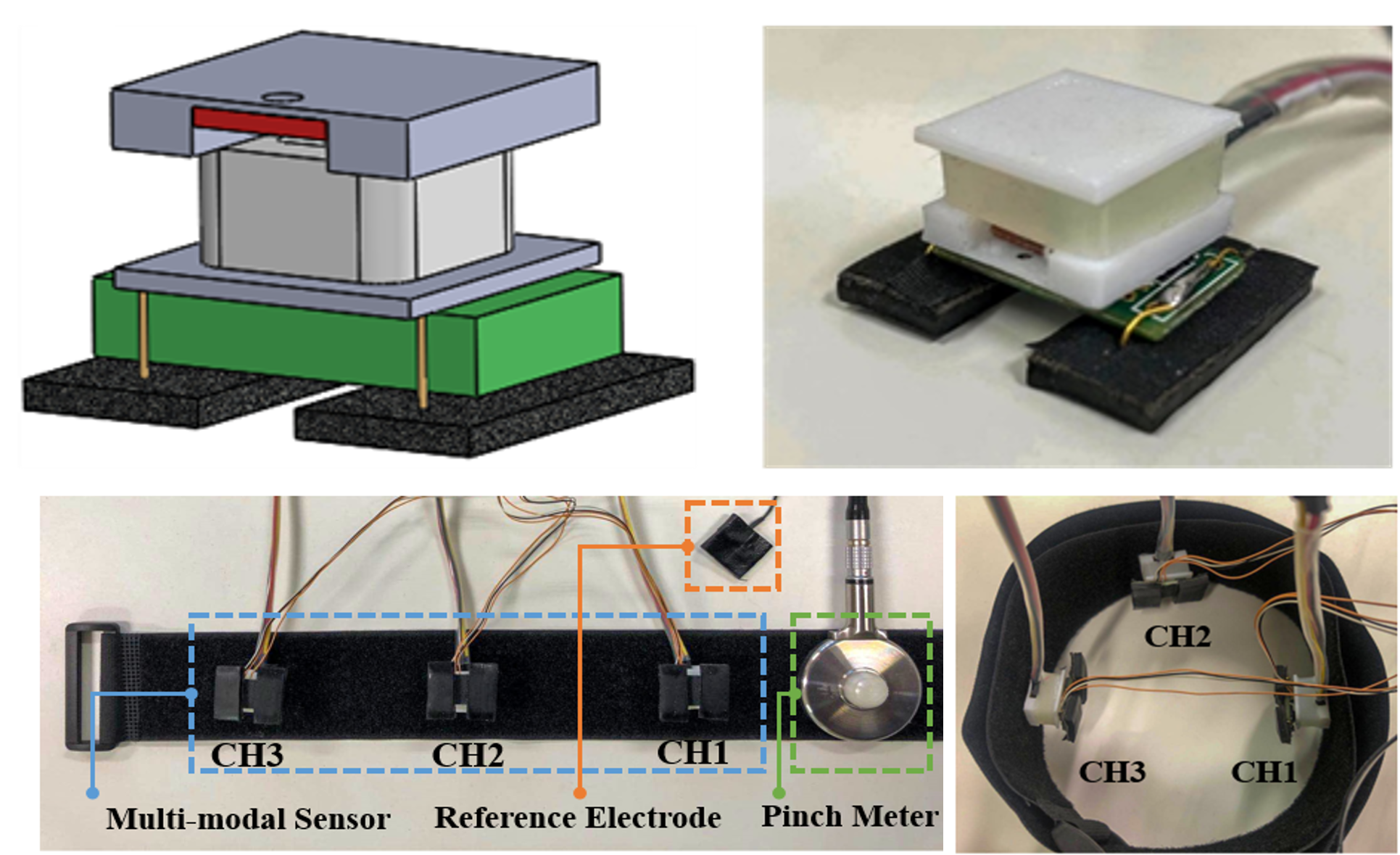
義手としてのロボットハンドの機能を十分発揮するために、切断者の残存筋より動作意図を安定的に最大限識別する必要がある。
我々の研究は、前腕から手の運動意図を正確に認識する新しいハイブリッドセンサーを開発している。
現在、主にsEMGとFMGの組み合わせにより、筋活動に伴う機能的信号と組織的信号の同時計測に取り組んでいる。
新開発した光学FMGユニットは、同じ場所でsEMGとEMGを同時に計測することができ、利用者の負担を増やさずに、
識別できる動作意図の数と質の向上を実現した。
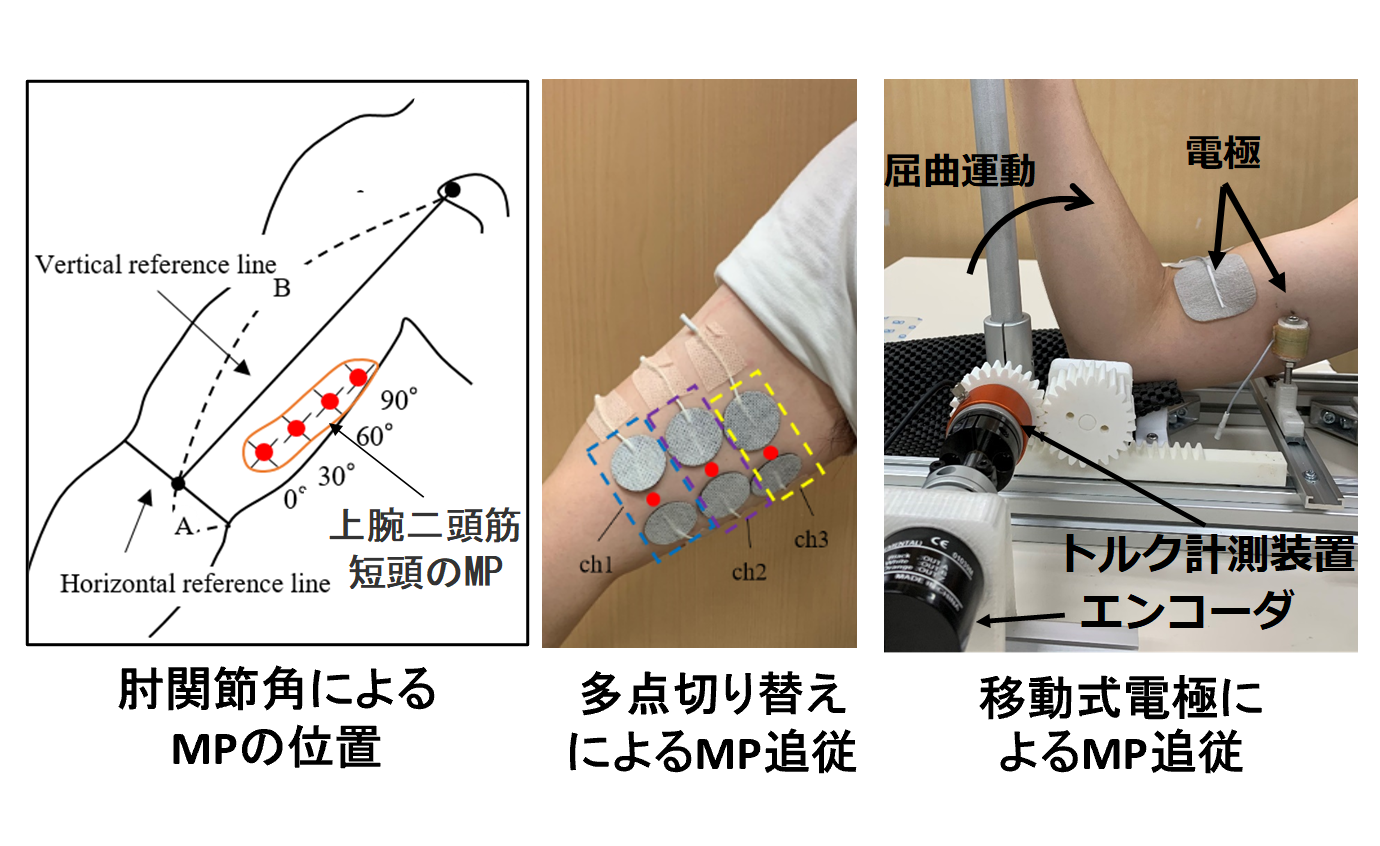
脳血管疾患や脊髄損傷による麻痺者の運動機能回復の方法として、FES(Functional Electrical Stimulation、
機能的電気刺激)の利用が推奨されている。FESは、電気刺激で筋肉を収縮させて損なわれた運動機能を補い、
筋肉の健康維持や動作の再構築をしようとする治療法である。しかし、健常者の随意収縮と異なり、
電気に誘発された筋収縮は、疲労になりやすい欠点がある。
本研究室は、筋疲労を軽減する方法としてFESの最適刺激場所としてのMP(Motor Point)を追従するような刺激装置の開発、
電極の最適配置の解析、生体信号を用いた電気刺激の制御、との三つの方向からFESのリハビリテーション効果の向上を目指す。
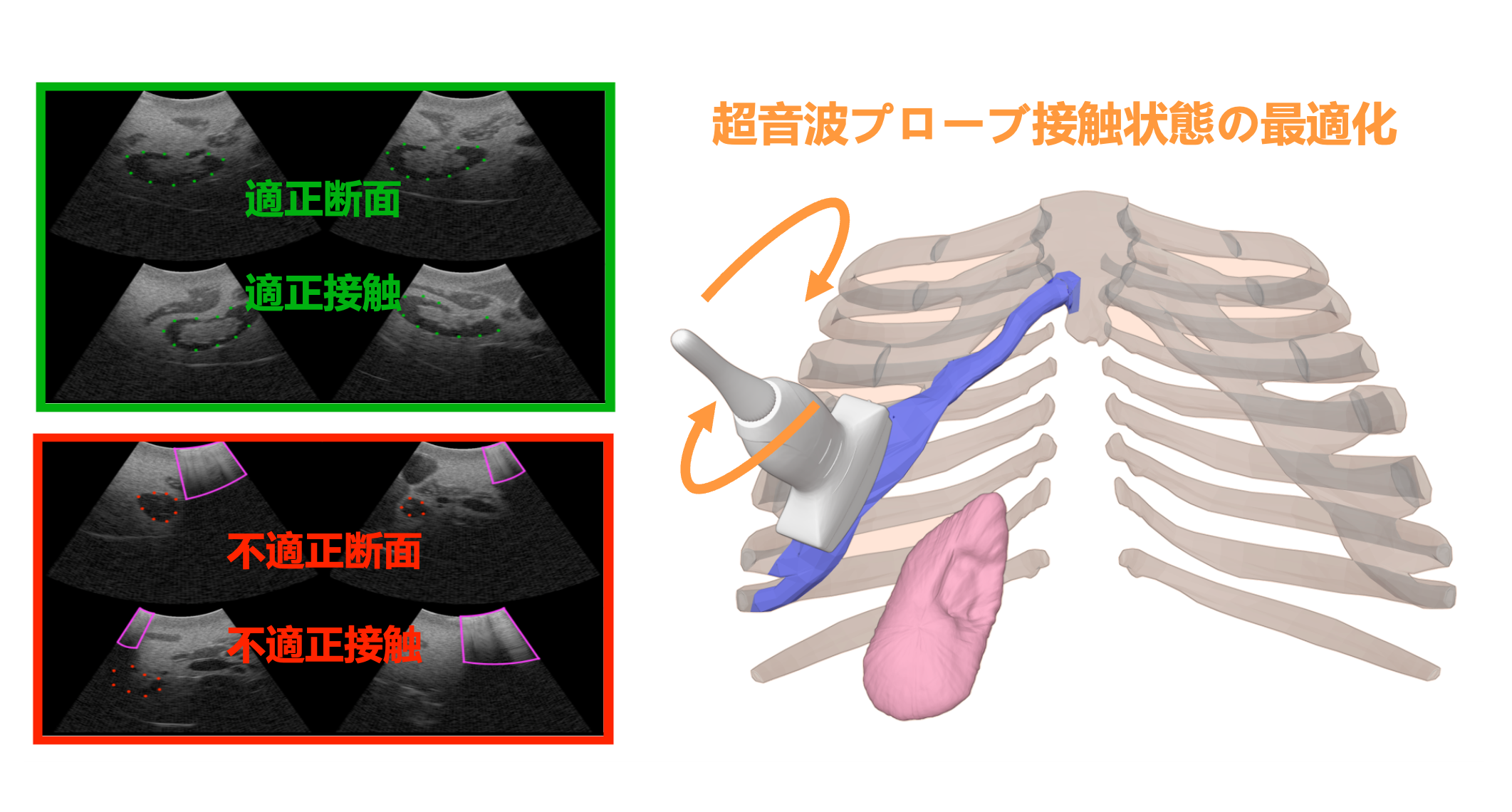
人とロボットが協調する医工学システムでは、生体の動きに柔軟に適応できる認識・追従技術が不可欠である。 本研究では、呼吸や体動に伴って動的に変化する臓器運動を対象として、画像計測、状態推定,運動追従、および予測に関する要素技術を開発する。 これにより、生体と調和しながら動作するロボットシステムの実現を目指し, 医療支援における安全性、精度、操作性、ならびに環境変動に対する適応性の向上に貢献する。
ロボットの動画は[研究室YouTube]でご覧ください。