| 2021年度・博論 |
君塚 進 |
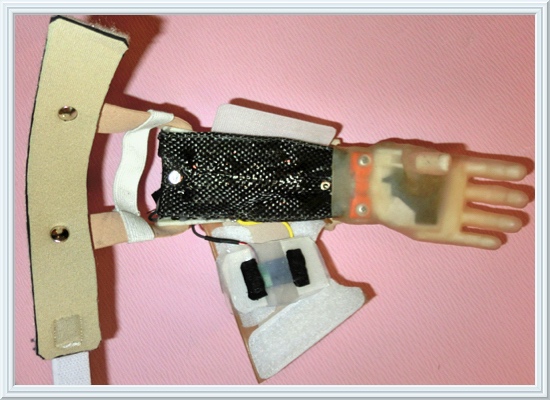
直感操作型肩義手システムおよび軽量多自由度な肩義手アーム |
| 2021年度・博論 |
景 曉蓓 |
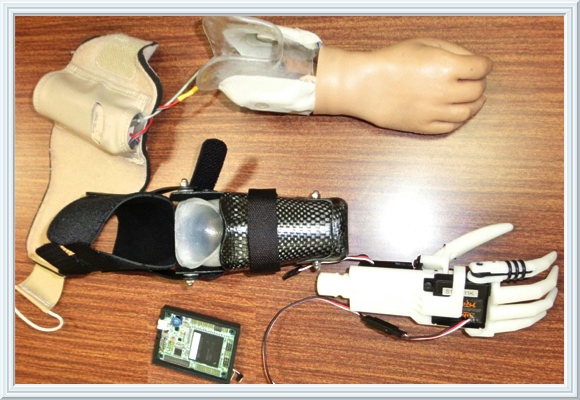
デュアル把持モードを備えた単一駆動源による多動作・軽量型幼児用義手の開発 |
|
| 2020年度・博論 |
雍 旭 |
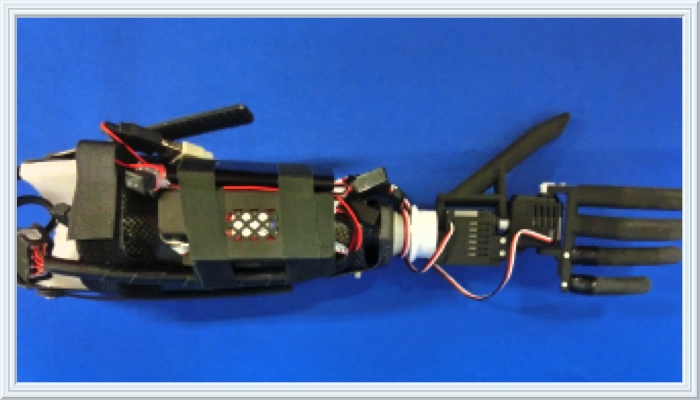
主要生活動作を実現した義手用軽量ロボットハンドの開発 |
| 2020年度・修論 |
小野 祐真 |
防水エラスティックsEMGセンサ |
| 2020年度・修論 |
佐藤 文隆 |
ワイヤ干渉機構を用いた二指干渉駆動ハンドの設計・開発 |
| 2020年度・修論 |
中尾 聡一郎 |
先天性前腕欠損・手掌欠損のための歯車機構を用いた幼児用義手の手先具の開発 |
| 2020年度・修論 |
平井 太智 |
先天性前腕欠損者のための幼児用2自由度電動義手の開発 |
| 2020年度・修論 |
宮﨑 健太 |
筋電肩義手制御のための体幹表面筋電位から上肢動作を復元するシステムの開発 |
| 2020年度・修論 |
李 子燁 |
筋電制御のためのマルチモーダル生体信号計測システムの開発 |
| 2020年度・卒論 |
早見 祐亮 |
伸縮センサを用いた義手の手先角度の測定法の提案 |
| 2020年度・卒論 |
高橋 明丈 |
筋電義手の感覚代替システムにおける提示刺激・変調特性の違いによる知覚特性の比較 |
| 2020年度・卒論 |
村山 紗耶 |
小児用筋電義手の訓練のための犬型玩具の設計・開発 |
| 2020年度・卒論 |
平野 拓海 |
Pick and Place実験による筋電義⼿システムへの習熟の傾向の調査 |
| 2020年度・卒論 |
柿野 和真 |
伸縮機構を備えたロボティック・フィンガーの開発 |
| 2020年度・卒論 |
柱 衣蕗 |
義手制御のためのsEMGとFMGデュアルモーダルセンサの開発 |
| 2020年度・卒論 |
関 美咲 |
ワイヤ干渉駆動機構の軽量化および薄型化に関する研究 |
| 2020年度・卒論 |
張 煕 |
EMアルゴリズムと混合ガウス分布により筋電の時変性に対応できる識別方法の開発 |
| 2020年度・卒論 |
稲村 慎哉 |
導電性シリコーンを用いた接触面積を検知できる触覚センサの開発 |
|
| 2019年度・博論 |
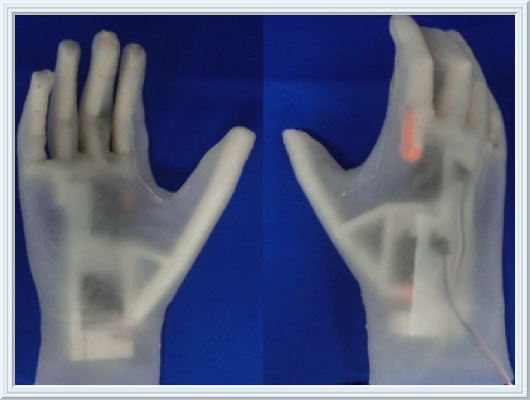
矢吹 佳子 |
筋電義手のための超弾性グローブの開発 |
| 2019年度・修論 |
小畑 承経 |
動的安定設計に基づいた電動義手の開発 |
| 2019年度・修論 |
黒田 勇幹 |
身体と周辺環境との相互作用に基づく義手制御システムの開発 |
| 2019年度・修論 |
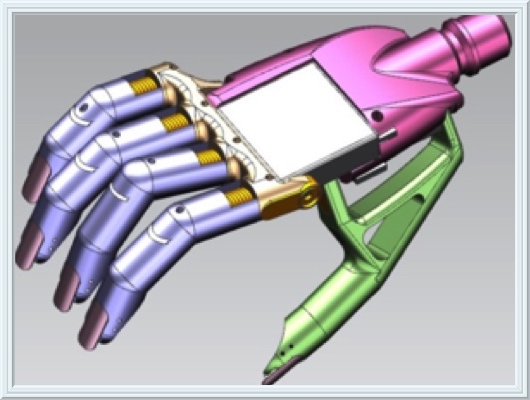
志村 駿 |
4指なじみ把持機構を有する多自由度ロボットハンドの開発 |
| 2019年度・修論 |
原田 拓真 |
表面筋電位と音声認識を組み合わせた筋電義手制御に関する研究 |
| 2019年度・修論 |
松本 一朗 |
マルチモーダルな生体情報を用いた筋電肩義手の制御に関する研究 |
| 2019年度・卒論 |
島田 孝太 |
装飾用グローブと一体化可能な多元的感覚センサのためのホール素子の応用 |
| 2019年度・卒論 |
千田 知広 |
自由度筋電義手の最適関節自由度に関する研究 |
| 2019年度・卒論 |
中尾 裕貴 |
筋電義手のため聴覚フィードバックによる触圧覚の代替システム |
| 2019年度・卒論 |
熊谷 あやね |
ヒト指末節骨の形態的に基づいた人工指による精密把持性の検証 |
| 2019年度・卒論 |
尾形 優斗 |
低自由度入力を用いた多自由度肩義手コントロールシステムの開発 |
| 2019年度・卒論 |
中村 優子 |
肩義手のための振動刺激を用いた腕の位置のフィードバックシステムの開発 |
|
| 2018年度・修論 |
馮 翔 |
多⾃由度筋電義⼿の性能評価に関する研究 |
| 2018年度・修論 |
⽔落 千彰 |
fNIRSを⽤いた筋電義⼿使⽤時の脳評価に関する基礎研究 |
| 2018年度・修論 |
SHI YUANKAN |
サイボーグインターフェースのための電極インピーダンスバランサーの開発 |
| 2018年度・修論 |
⽑利 保寛 |
導電性シリコーンを⽤いた筋電義⼿のため感覚フィードバックに関する研究 |
| 2018年度・卒論 |
久⽶ 駿⽣ |
学習速度と識別率を両⽴する筋電義⼿組込みシステムのためのパラメータ探索 |
| 2018年度・卒論 |
平井 太智 |
ワイヤ無限巻き取り機構を搭載した幼児⽤筋電義⼿の開発 |
| 2018年度・卒論 |
佐藤 ⽂隆 |
ワイヤ⼲渉機構を⽤いたシリコーンハンドの設計・開発 |
| 2018年度・卒論 |
鎌⽥ 舞花 |
筋電義⼿使⽤における習熟度の変化について |
|
| 2017年度・修論 |
⾕ 直⾏ |
⽇常⽣活動作のための知的把持機構に関する研究 |
| 2017年度・修論 |
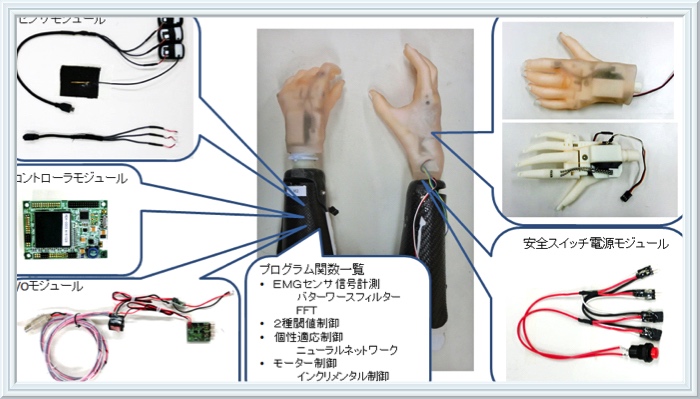
君塚 進 |
表⾯筋電位を⽤いた主成分分析と個性適応制御による肩義⼿システムの研究 |
| 2017年度・修論 |
⽇吉 祐太郎 |
乳幼児義⼿のための個性適応型制御の開発 |
| 2017年度・卒論 |
庭⽥ 建 |
ワイヤ牽引駆動のための無限ワイヤ巻き取り機構に関する基礎研究 |
| 2017年度・卒論 |
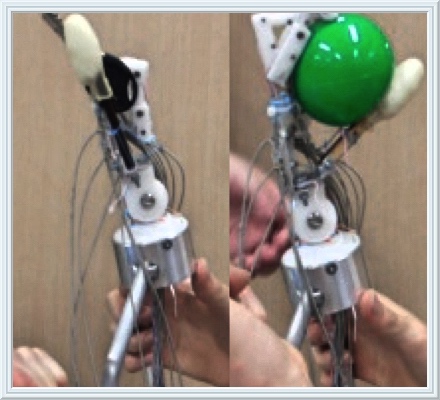
志村 駿 |
⾻格内包型ワイヤ牽引機構を⽤いたロボットハンドの設計・開発 |
| 2017年度・卒論 |
原⽥ 拓真 |
携帯端末を⽤いた筋電義⼿制御システムの開発 |
| 2017年度・卒論 |
松本 ⼀朗 |
表⾯筋電位を⽤いた肩義⼿の制御に関する研究 |
|
| 2016年度・修論 |
叶 |
小児用筋電義手のための倍力機構に関する研究 |
| 2016年度・卒論 |
毛利 |
導電性高分子を用いた感覚フィードバックシステムに関する基礎研究 |
| 2016年度・卒論 |
小上馬 |
筋電義手開発のためのShadow System |
| 2016年度・卒論 |
桑原 |
導電性シリコン電極を用いた筋電センサの開発および外力による影響の解析 |
| 2016年度・卒論 |
生澤 |
筋電義手における個性適応制御法の性能評価に関する基礎研究 |
|
| 2015年度・修論 |
迫田 |
筋電義手の臨床応用のためのモルフォロジカルインターフェイス |
| 2015年度・修論 |
星川 |
筋電義手の機能評価法の構築とその機構設計への応用 |
| 2015年度・修論 |
山野井 |
把持姿勢の識別と力推定のための線形回帰モデルの構築と筋電義手への応用 |
| 2015年度・卒論 |
谷 |
筋電義手のための受動安定性を有する屈伸関節機構に関する基礎研究 |
| 2015年度・卒論 |
馮 |
安定な精密つまみを実現する低自由度ハンドの構築 |
| 2015年度・卒論 |
日吉 |
個性適応制御法を用いた幼児・小児用筋電義手のための補助インターフェースシステム開発 |
| 2015年度・卒論 |
鈴木 |
導電性シリコンを用いた装飾用グローブ一体型全方位感圧センサの開発 |
|
| 2014年度・修論 |
雍 |
手指の主要な日常動作を内包するアクチュエータ内蔵型低自由度義手の開発 |
| 2014年度・修論 |
高澤 |
超弾性材を用いた人工靭帯機構の開発と五指ハンドへの応用に関する研究 |
| 2014年度・修論 |
鈴木 |
筋電義手の自然な操作感実現のためのマルチモーダルセンシングを利用した手指姿勢の制御法 |
| 2014年度・卒論 |
木村 |
屈曲角に応じた最大内外転角を持つ人工MP関節の開発 |
| 2014年度・卒論 |
當金 |
??? |
|
| 2013年度・修論 |
田中 |
ベクトル量子化を用いた個性適応型筋電義手の開発 |
| 2013年度・卒論 |
山野井 |
筋電義手制御のための把持姿勢識別及び把持力推定に関する研究 |
| 2013年度・卒論 |
迫田 |
多チャンネル電極を用いた手指姿勢の識別に関する研究 |
| 2013年度・卒論 |
星川 |
基本3種の把持姿勢をとる2自由度筋電義手の指形状の探索 |
|
| 2012年度・卒論 |
伴 |
日常生活で使用する基本3種の把持形態を持つ低自由度義手の開発 |
| 2012年度・卒論 |
高澤 |
多様な把持形態を実現可能な筋電義手のためのワイヤ干渉駆動型母指機構の開発 |
|
| 2011年度・修論 |
山岸 |
人工指のための全方位型感圧センサの開発 |
| 2011年度・修論 |
平田 |
義手の感覚フィードバックのための空間的刺激提示法の開発 |
| 2011年度・修論 |
關 |
ワイヤ干渉駆動を用いた五指型ロボットハンドの駆動力配分メカニズムに関する研究 |
| 2011年度・卒論 |
八木田 |
義手用形状記憶合金アクチュエータの機構開発 |
| 2011年度・卒論 |
田中 |
乳幼児および小児のための多自由度筋電義手の開発 |
| 2011年度・卒論 |
佐久間 |
肩関節離断を対象とした筋電義手の開発とその筋電制御法の検討 |
|
| 2010年度・卒論 |
松谷 |
上肢欠損を対象とした干渉駆動機構を用いた筋電義手の開発とその筋電制御法の検討 |
| 2010年度・卒論 |
山本 |
日常生活利用のための筋電義手の対向指による精密把握 |